
- Home
- About the Lab
- Research
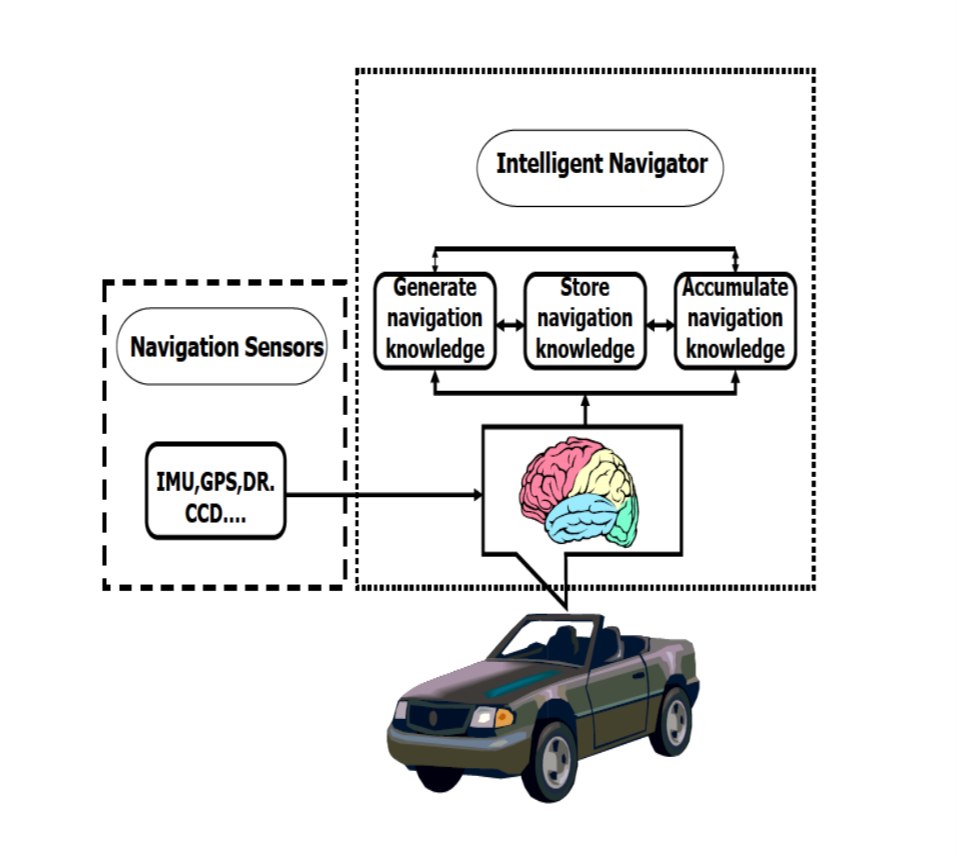
(Chiang et al., 2004)
- Inertial Navigation and Multi-Sensor Fusion Technologies and Their Applications
- Mobile Mapping, Environmental Perception Technologies and Their Applications
- Optimal Estimation Methods and Their Applications
- Artificial Intelligence and Deep Learning
The POINT Lab Team at National Cheng Kung University (NCKU) has long focused on the development of AI-assisted multi-sensor fusion technologies applied to in-vehicle and pedestrian navigation, positioning, and mapping. The team is recognized as one of the global pioneers in this field and as a leading international research group.
Since 2003, team members have received a total of 16 Best Student Paper Awards at GNSS conferences organized by the Institute of Navigation (ION), a leading authority in global navigation. Notably, at the ION GPS conferences in 2003, 2006, 2007, and 2008, as well as the ION GNSS+ conference in 2017, the award-winning papers focused on AI-assisted multi-sensor fusion for vehicular and pedestrian navigation, positioning, and mapping, demonstrating the team’s depth of expertise and innovative capabilities in this area.
The NCKU POINT Lab Team is dedicated to advancing AI-assisted multi-sensor fusion positioning and mapping technologies, covering research areas such as satellite navigation, inertial navigation, mapping, and high-precision positioning algorithms. Their work is applied in autonomous driving, pedestrian navigation, unmanned vehicles, and intelligent transportation systems, positioning the team as a global pioneer and an internationally leading R&D group in this field.
The laboratory is composed of an internationally influential research team, led by Professor Kai-Wei Chiang,
who has long been engaged in research on satellite positioning and navigation technologies. According to ScholarGPS global academic rankings, Professor Chiang ranks:
Top 0.9% in Satellite Navigation
Top 0.19% in Navigation
Top 0.42% in Global Positioning System (GPS)
These outstanding academic achievements underscore the laboratory’s international leadership in navigation, positioning, and high-precision mapping technologies.
Research Focus
Multi-Source Sensor Fusion and Algorithms: Integrating GNSS, INS, LiDAR, imagery, and SLAM technologies to achieve high-precision and highly reliable positioning systems.
AI-Assisted Navigation and Mapping Technologies: Leveraging machine learning and deep learning models to enhance positioning accuracy, anomaly detection, and map updating efficiency.
HD Maps and Autonomous Driving Applications: Developing high-resolution map generation and updating workflows to support autonomous vehicles and intelligent mobile environment perception.
Industry-Academia Collaboration and Technology Deployment: Partnering with industry and government agencies to apply core technologies in real-world scenarios and commercial platforms.
Research Achievements
The POINT Lab has published research results in top international journals and conferences, including IEEE, ISPRS, ION GNSS+, CVPR, and ICRA, and holds multiple patents related to positioning and navigation technologies. The laboratory not only drives academic innovation but also actively promotes the translation of research outcomes into industrial applications, laying a solid foundation for the development of intelligent transportation and geospatial technologies.
Since 2003, team members have received a total of 16 Best Student Paper Awards at GNSS conferences organized by the Institute of Navigation (ION), a leading authority in global navigation. Notably, at the ION GPS conferences in 2003, 2006, 2007, and 2008, as well as the ION GNSS+ conference in 2017, award-winning papers focused on AI-assisted multi-sensor fusion for vehicular and pedestrian navigation, positioning, and mapping. These achievements highlight the team’s depth of expertise and innovative capabilities in this field.
Vision and Mission
POINT Lab is guided by the core principles of “Precise Positioning, Smart Navigation, and Innovative Integration.”The laboratory is committed to nurturing internationally competitive researchers, promoting cross-disciplinary collaboration, and maintaining leadership in intelligent mobility and navigation technologies, aiming to become a key research hub in Taiwan and the international academic community.